Robot Platform V
By Holger Zahnleiter
Abstract
This project is about building a robotics platform. The platform offers: Mechanics, power supply, drive, cameras, microphones, speaker, networking and compute. You can build your own robotics applications on top of this platform.
The case is 3D printable, the electronics components are all stock items. It is well suited for building your own.
The Git repository contains the original Fusion 360 CAD files as well as exports in various formats (STEP and STL). Furthermore, wiring diagrams, programs and descriptions are included.
The platform comes with a C++ API to control the devices:
- Custom C++ API to control drive and head
- Comming with Nvidia’s Linux distro for the Jetson platform:
- Linux drivers for wireles and wired networking
- Linux drivers for Bluetooth
- Linux drivers for USB audio (mics and speaker)
The usual suspects can be used to process audio and video: OpenCV, TensorFlow etc.

Take the door as areference to get a feeling for how big this 3D print actually is

Intel RealSense cameras for depth and tracking
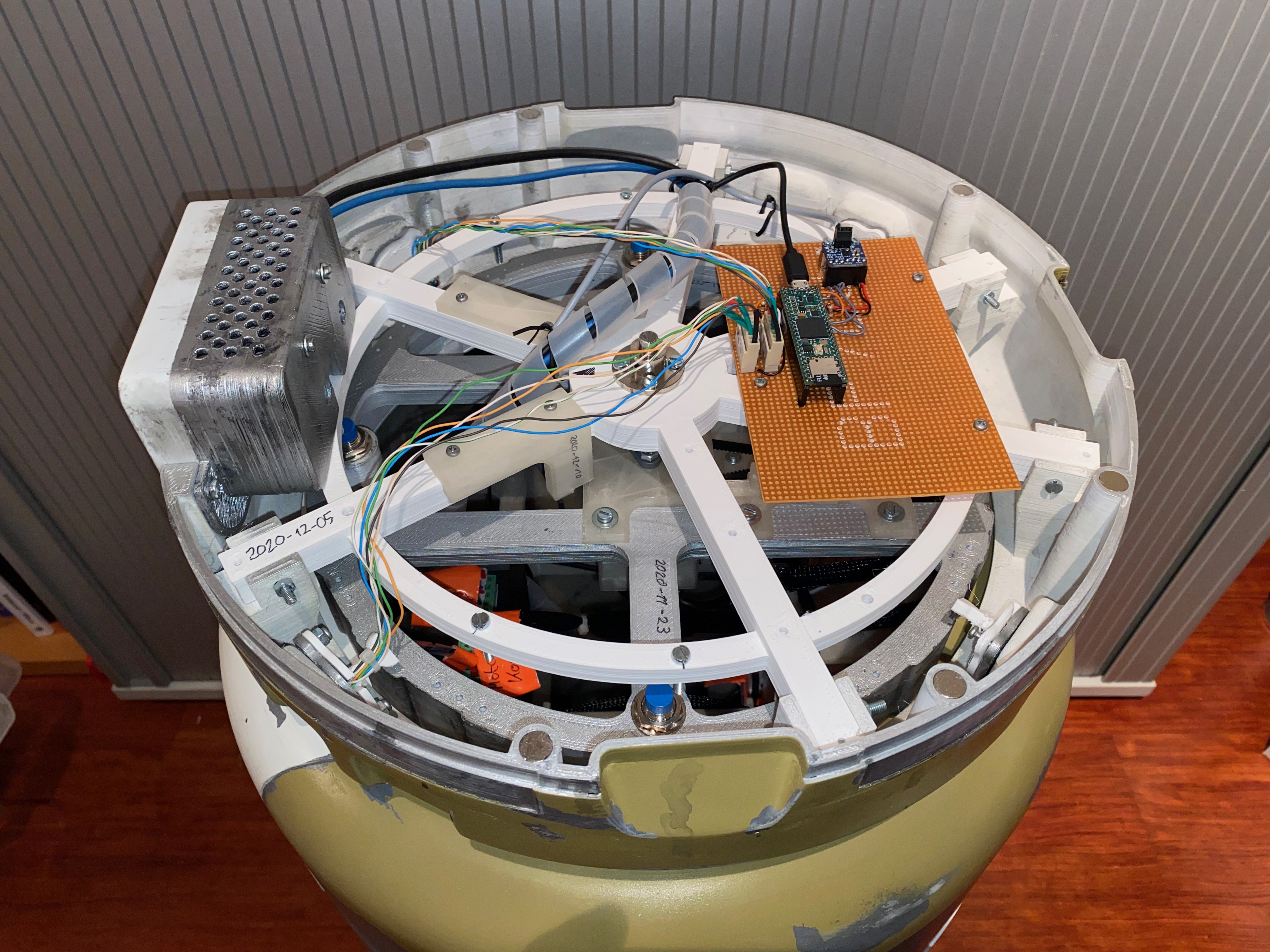
Teensy 4.1 inside head uses I2S to read mics and output audio via speaker
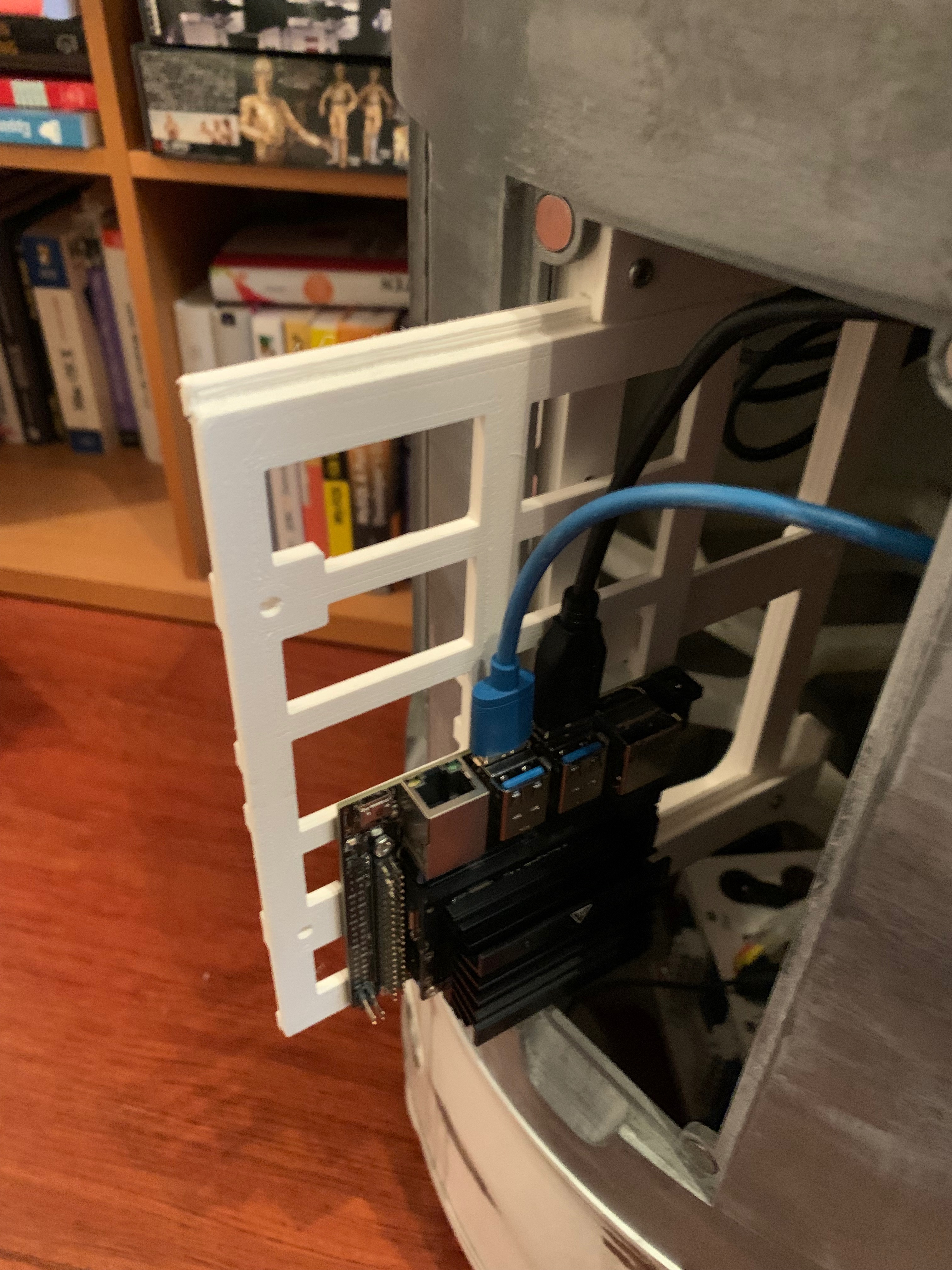
Nvidia Jetson Nano slide into back of robot
The concept is somewhat modular: The following picture shows adapters for NEMA 17 and NEAM 23 stepper motors. The NEMA 17 motors turned out to be too weak. I quickly designed and printed another adapter to fit NEAM 23 motors. These have sufficient power to reliably move the robot.

Attaching the drive motors and wheels
Big openings in the body give access to the interior. This is especially convenient when mounting electronics and mechanics inside. The covers are helt in place by magnets. This way I avoided to design complex hinges or locks.

Assembly work at the front

Assembly work at the back
Project Source
Find the project's sources here: https://gitlab.com/hzahnlei/robot-platform-5 My Git repositories usually do not only contain source code. Typically you will find documentation, instructions and tests.Status
- Begin date: 2020-10-12
- End date: 2022-03-30
- Status: The first iteration of that project is done. Improvements will follow.
Disclaimer
This is a non-profit, free and open source project. The information on this web site and the documents downloadable from here have been carefully reviewed and is believed to be reliable, but I do not assume any liability arising out of the application or use of any documents, programs or circuit described herein. Furthermore I want to declare that I'm not responsible in any way for the content of other web pages, books and other sources I'm refering to.Credits
I am using free and/or open source products and services. I want to thank enterprises, organizations and individuals alike for providing free services and open source software, electronics and mechanical designs and for sharing their knowledge and insights. The respective products and services are recognized in theREADME.md that accompanies the project
source.